|
|

|

|
| e-Pub |
Section: New Results
Model-Driven Engineering for Activity Recognition
Participants : Sabine Moisan, Jean-Paul Rigault, Luis Emiliano Sanchez.
keywords: Feature Model Optimization, Software Metrics, Requirement specification, Component-based system, Dynamic Adaptive Systems, Model-Driven Engineering, Heuristic Search
The domain of video surveillance (VS) offers an ideal training ground for Software Engineering studies, because of the huge variability in both the surveillance tasks, the video analysis algorithms and the context. Such systems require run time adaptation of their architecture to react to external events and changing conditions in their context of execution.
The feature model formalism is widely used to capture variability, commonalities and configuration rules of software systems. We thus use feature modeling to represent the variability of both the specification and component views of video surveillance systems. We also include cross-tree constraints that formalize extra feature dependencies.
Based on this feature model, we can both select an initial system configuration at deployment time and dynamically adapt the current configuration at run time. This year we focused on runtime adaptation, from feature model to running components.
Configuration Adaptation at Run Time
In the continuation of our work on metrics on feature models, we have integrated a configuration selection algorithm in our feature model manager. Context changes or user interactions imply to dynamically reconfigure the model (selecting or deselecting features). Following model at run time techniques, we are able to determine the set of valid configurations to apply in a new execution context. Since only one configuration can be applied at a given time, the role of the selection algorithm is to select the “best” one.
To this end we enriched our feature representation with a set of quality attributes that correspond to a monotonic quantification of interesting aspects of the system quality. Examples are response time, accuracy, availability, performance, component switching time, etc. The configuration selection algorithm optimises a cost function, a linear weighted combination of the quality attributes. Thus we can rank the possible valid configurations and choose an optimal one. Our algorithm is a variant of the Best-First Search algorithm, a heuristic graph search technique. It starts with the set of valid configurations, which is a feature model where some features are unselected. Then it performs a systematic search in a graph where nodes are configurations and edges are selections or deselections of unselected features. The goal is to obtain a full configuration (one without unselected features) optimizing the cost function. The algorithm is parameterized with different strategies and associated heuristics with different optimality and efficiency characteristics.
Search strategies decide which node to visit next. We choose two well-known informed strategies that rely on heuristic functions as choice criteria. First we used a variant of the A* algorithm, BF*, but with a node-cost function instead of a path-cost one; it favors optimality over efficiency. Second, we implemented a Greedy Best-First Search (GBFS) strategy, where the next visited node is the best successor of the current one; it favors efficiency over optimality.
Computing the exact value of the cost function for a partial configuration is too expensive. We thus use heuristics to obtain a quick estimate. We have tested two sorts of heuristics. The simplest one, , ignores the differences between the various sorts of groups (AND, OR, XOR) in the feature model and does not considers cross-tree constraints; it is fast but not very accurate. The second one, , just drops the cross-tree constraints; it is thus more accurate, yet at an higher cost.
|
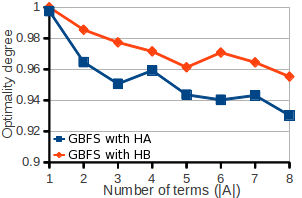
We have run experiments using large (randomly generated) feature models and compared completeness, optimality and efficiency of the selection algorithm, with different combinations of strategies and heuristics [42] . From our experiments, the GBFS strategy with heuristics appears as the ideal option for real time systems that have to adapt in bounded time. This strategy ensures polynomial time complexity and guarantees optimality over , which is good enough for our purpose (see figure 45 ). On the other hand, BF* strategy with heuristics is ideal for offline decisions, such as defining the initial configuration of a system. Although this search strategy takes a significant time to compute, this is acceptable at deployment time to obtain the optimal configuration.
Run Time Components
When a configuration has been chosen, we must implement it with real components. We consider a configuration of a video-surveillance processing chain as a set of running components, that can be tuned, removed, added, or replaced dynamically, in response to events. To apply such configuration changes, we need a way to represent and dynamically manipulate the components themselves.
In a first attempt, we used an OSGi-like C++ framework (SOF, Service Oriented Framework However, SOF did not really fulfilled our needs. First, SOF is the only C++ OSGi framework that we could find and its C++ implmentation deserves some improvement. Moreover, like OSGi, it relies on the notion of “service”, as can be found in Web applications, but which does not really fit our real time requirements. This notion of service is not our concern and makes programming more complicated than necessary.
Thus, we decided to define our own component module and to integrate it in a multi-threaded layer, easy to use for our end-users who are video system developers. Each component runs by default in its own thread and communicates with other components through standardized communication channels. Our goal is to provide end-users with simple patterns to package their video codes into components. Thus we hide as much as possible the technical details such as threading synchronization, data exchange, and mechanisms for component management (replacement, tuning...) ensuring a continuous process.
We are currently setting up this framework on a simple video detection pipeline with OpenCV-based components. Then we shall integrate it within our Model at Run Time architecture.